|
We found out that the the angle 35 (a metal piece we have to attach) can’t fit because the rods weren’t long enough to go through the holes in agle 35 so we had to unscrew all of the screws that we used to stabilize the rod and had to attach them out as much as we can so we can attach the angle 35. One of our members (the programmer) was learning coding and started to learn about the controller and the codes needed for the project. We ran out of parts to use so we have to wait until next week for the parts to arrive. 
0 Comments
Today we started stabilizing the wheels onto the base of the robot. We’ve finished adjusting the gears, so we added the wheels. We’ve attached enough wheels so that the robot can move. With the wheels and gears attached, we then tightened the bolts to make sure they don’t come off. After we’ve finished tightening the bolts, we then started to look through available metal. Before we’re managed to attach the extra metal beams, the class ended. Overall we’ve managed to finally attach wheels and tighten the bolts holding the wheels. Somewhat. We still have to completely stabilize the wheels since we only stabilized one side. We plan to attach the motors, next class. 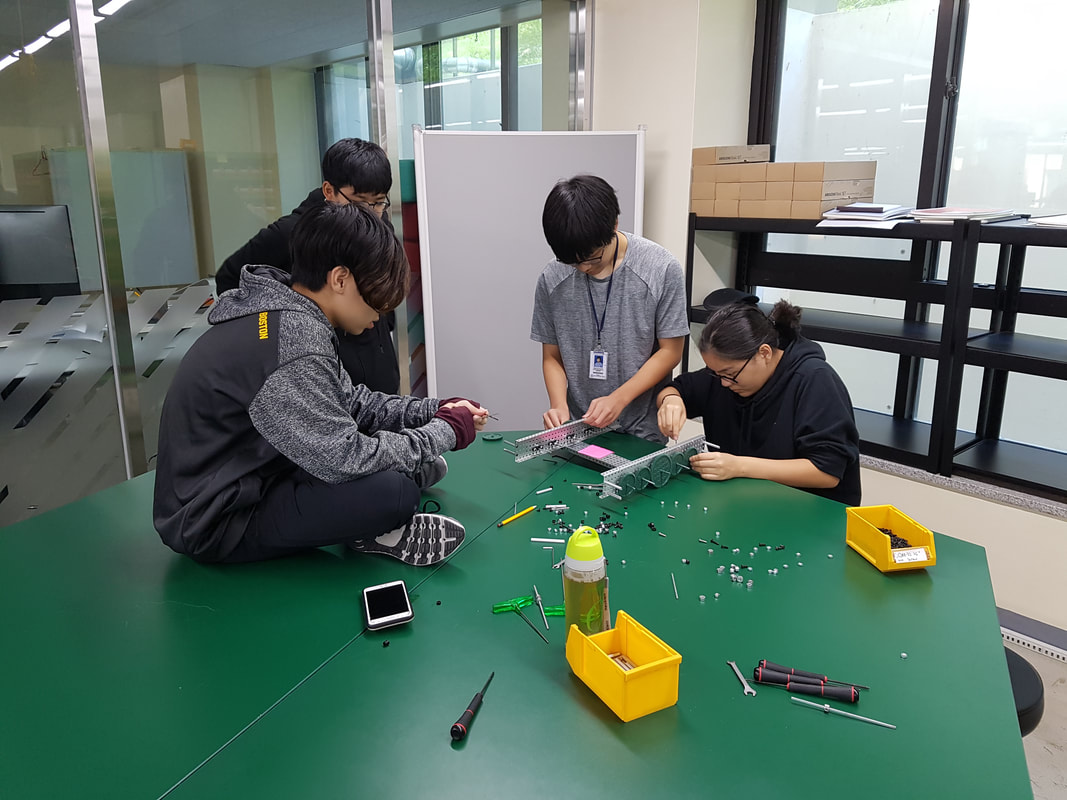 |
AuthorWrite something about yourself. No need to be fancy, just an overview. Archives
November 2018
Categories |
 RSS Feed
RSS Feed
